Our Projects
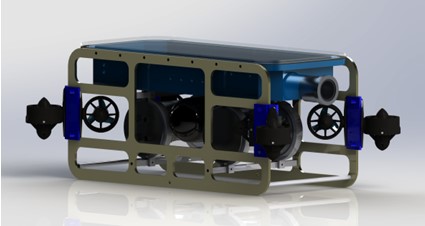
Sedna
The Sedna Autonomous Underwater Vehicle (AUV) is designed with a focus on modularity, compactness, and lightweight construction. The vehicle features a sliding deck with a rack system inside its hull, allowing easy access and removal of electronic components. The external frame is designed for easy redesigns with minimal effort. The vehicle's mechanical and structural designs were modeled and analyzed using SolidWorks, Catia, and ANSYS.
Vehicle Specifications:
Depth Rating:
- 50ft (Acrylic Hull)
- 200ft+ (Aluminum Hull)
- Max Speed: 0.6 m/s
- Dimensions: 43" L x 16" W x 20" H
- Weight: 45kg
- Runtime: 1 hour 30 minutes
- Thrusters: 8x for active yaw, pitch, heave, surge, and roll control
- Vision System: Stereoscopic

Sedna 2.0

The SRM University Autonomous Underwater Vehicle (SRMAUV) Team, comprising passionate undergraduate students from SRM University, Chennai, has developed the AUV Sedna 2.0. This vehicle is a significant upgrade over its predecessor, designed for participation in the annual Autonomous Unmanned Vehicle System International (AUVSI) and the Office of Naval Research (ONR) Robosub Competition in San Diego. Sedna 2.0 is engineered to autonomously navigate complex underwater environments, performing tasks such as obstacle avoidance, buoy touching, torpedo launching, marker dropping, acoustic beacon localization, and object manipulation.
Zarna
This project involves the design and development of an advanced autonomous underwater vehicle (AUV) named ZARNA, aimed at enhancing sub-sea exploration and marine research. The AUV is designed with a modular, hydrodynamic, and neutrally buoyant structure, featuring a segmented external frame with a cuboidal hull. The mechanical system includes eight thrusters configured to provide six degrees of freedom (DoF) and incorporates a pneumatically actuated grabber arm and marker droppers for underwater object detection and manipulation.